In the original project plan, each participant would bring the robot in person to the next location. Because of Covid-19, unfortunately that is not possible, therefore the preface of my month with Gaia is waiting for the DHL parcel delivery. And that takes some time. Being send on October 1st, first Gaia seems to arrive on October 2nd, then October 3rd and finally she arrives on Monday 5th of October at the end of the day, that’s 5 days less to spend with her. While people can travel very limited, Gaia has made an odyssey from Bremen to Leipzig, that by plane to Amsterdam and then to Groningen. And Bremen is only two hours from Groningen, meeting at the border would have been a better solution.
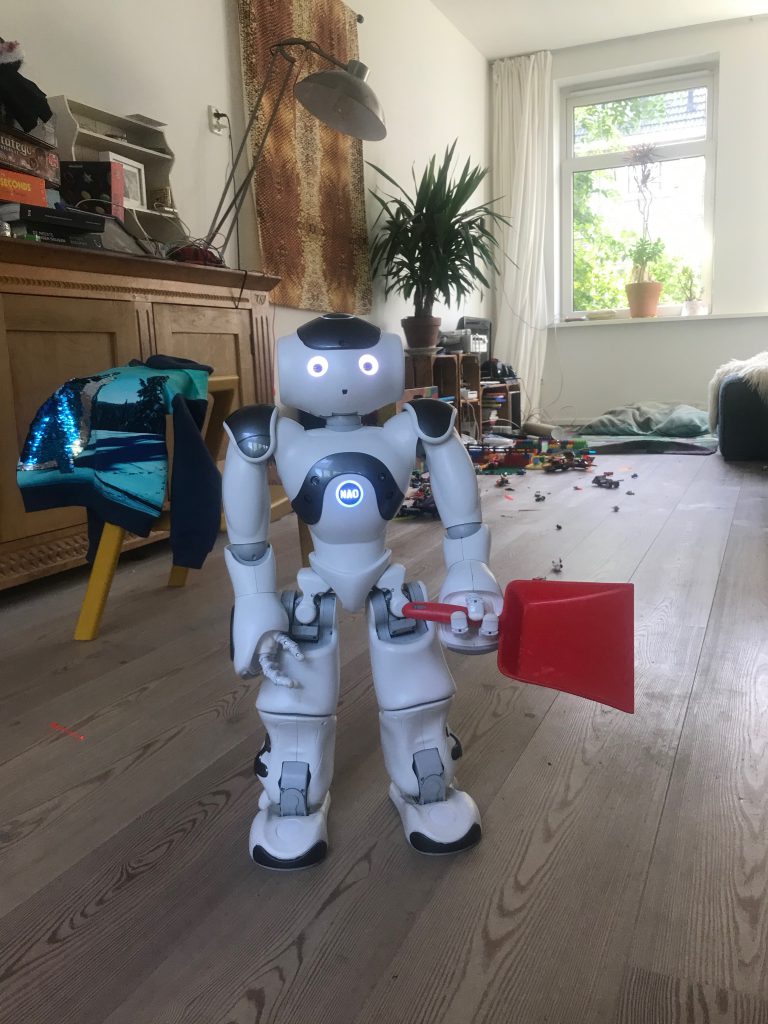
However, she was there! After unwrapping the two packages and opening a very professional looking suitcase Gaia was sitting right there in my own house. Time to turn her on, exciting! Some flashing multicolored leds, some sounds, some flashings leds again, but then nothing… Maybe if I push the NAO button on the chest something will happen? Yes, she’s telling me her IP address in Italian. I have an IP-address, so I exist. But then nothing happens again, or wait a minute, she’s following me with her head, she’s looking at me!
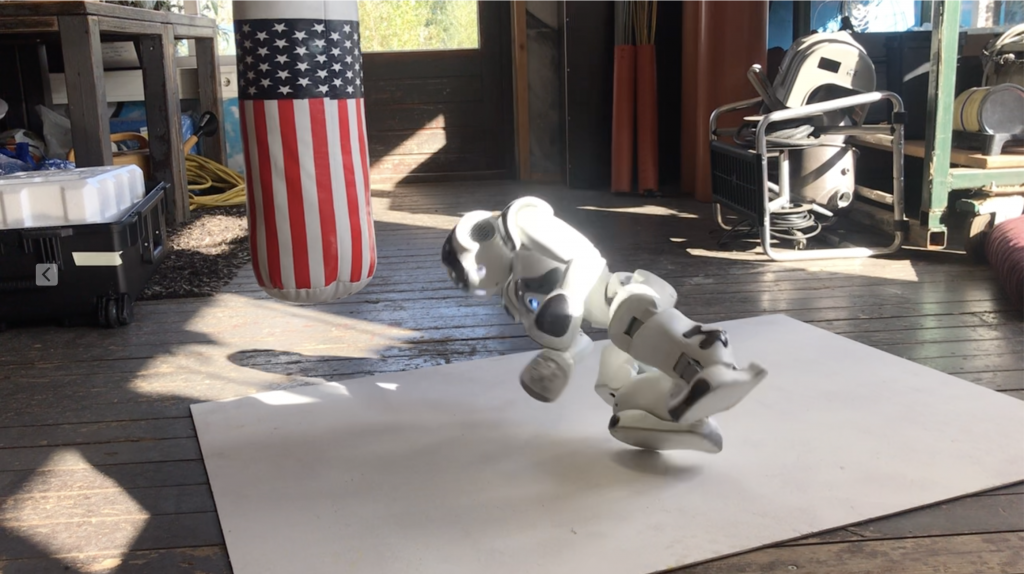
That’s a very good start, in boxing, always keep looking at your opponent.